About general contact in Abaqus/Standard | ||||||||||
|
| |||||||||
ProductsAbaqus/StandardAbaqus/CAE
Defining a general contact interaction
The definition of a general contact interaction consists of specifying:
-
the general contact algorithm and defining the contact domain (i.e., the surfaces that interact with one another), as described in this section;
-
the contact surface properties (Surface properties for general contact in Abaqus/Standard);
-
the mechanical contact property models (Contact properties for general contact in Abaqus/Standard);
-
the controls associated with the initial contact state (Controlling initial contact status in Abaqus/Standard); and
-
the algorithmic contact controls (Numerical controls for general contact in Abaqus/Standard).
An example of an analysis that uses general contact to define contact between the various components of an assembly is described in Impact analysis of a pawl-ratchet device.
![]()
Surfaces used for general contact
The general contact algorithm in Abaqus/Standard allows for quite general characteristics in the surfaces that it uses, as discussed in About contact interactions. For detailed information on defining surfaces in Abaqus/Standard for use with the general contact algorithm, see Element-based surface definition.
A convenient method of specifying the contact domain is using cropped surfaces. Such surfaces can be used to perform “contact in a box” by using a contact domain that is enclosed in a specified rectangular box in the original configuration. For more information, see Operating on surfaces.
In addition, Abaqus/Standard automatically defines an all-inclusive surface that is convenient for prescribing the contact domain, as discussed later in this section. The all-inclusive automatically defined surface includes all element-based surface facets and crack surfaces for enriched elements.
The general contact algorithm does not consider contact involving analytical surfaces or node-based surfaces, although these surface types can be included in contact pairs in analyses that also use general contact.
![]()
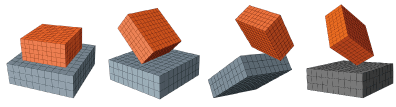
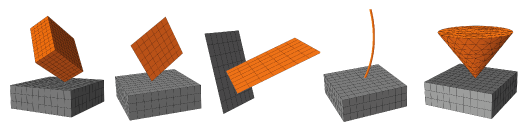
Types of contact formulations within general contact targeting various scenarios
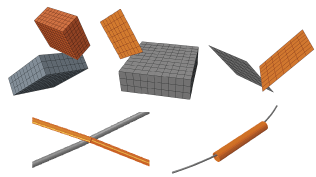
The general contact algorithm in Abaqus/Standard offers capabilities to model surface-to-surface contact, edge-to-surface contact, edge-to-edge contact, and vertex-to-surface contact. The surface-to-surface contact formulation is the primary formulation for general contact. The surface-to-surface contact formulation mainly treats cases with contact over an area of dimensions significant compared to surface facet dimensions, such as the case on the right in Figure 1. General contact uses the other contact formulations as supplementary formulations. For example, the second, third, and fourth cases in Figure 1 would be treated with the edge-to-surface, edge-to-edge, and vertex-to-surface formulations, respectively. The supplementary formulations are also used by general contact to treat contact involving beam and truss elements.
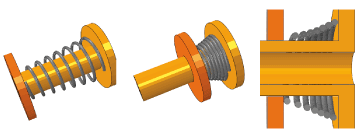
Transitions between the predominant type of contact formulation active in a local region are common. For example, the edge-to-surface contact formulation would be predominant at the stage of the snap-fit simulation shown in Figure 2 because the active contact zone corresponds to a feature edge.
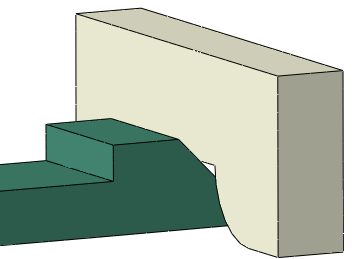
Upon further insertion, the surface-to-surface contact formulation would become predominant once the top surface of the darker colored part is in contact with the other part over a significant area. General contact automatically handles transitions between predominant contact formulations as contact conditions evolve. Multiple types of contact constraints will be locally active during transitions. The supplementary contact formulations are always enforced with a penalty method, which helps avoid numerical issues with “over-constraints” while multiple constraint types are active.
Additional discussion of the surface-to-surface contact formulation is provided in Surface-to-surface contact discretization. See Edge-to-surface contact scenarios, Edge-to-edge contact scenarios, and Vertex-to-surface contact scenarios below, for more information on the supplementary contact formulations.
![]()
Including general contact in an analysis
General contact in Abaqus/Standard is defined at the beginning of an analysis. Only one general contact definition can be specified, and this definition is in effect for every step of the analysis.
Input File Usage
Use the following option to indicate the beginning of a general contact definition:
CONTACT
This option can appear only once in the model definition.
Abaqus/CAE Usage
Interaction module: Create Interaction: Step: Initial, General contact (Standard)
![]()
Defining the general contact domain
You specify the regions of the model that can potentially come into contact with each other by defining general contact inclusions and exclusions. Only one contact inclusions definition and one contact exclusions definition are allowed in the model definition.
All contact inclusions in an analysis are applied first, then all contact exclusions are applied, regardless of the order in which they are specified. The contact exclusions take precedence over the contact inclusions. The general contact algorithm will consider only those interactions specified by the contact inclusions definition and not specified by the contact exclusions definition.
General contact interactions typically are defined by specifying self-contact for the default automatically generated surface provided by Abaqus/Standard. All surfaces used in the general contact algorithm can span multiple unattached bodies, so self-contact in this algorithm is not limited to contact of a single body with itself. For example, self-contact of a surface that spans two bodies implies contact between the bodies as well as contact of each body with itself.
Specifying contact inclusions
Define contact inclusions to specify the regions of the model that should be considered for contact purposes.
Specifying “automatic” contact for the entire model
You can specify self-contact for a default unnamed, all-inclusive surface defined automatically by Abaqus/Standard. This default surface contains, with the exceptions noted below, all exterior element faces. This is the simplest way to define the contact domain.
The default surface does not include faces that belong only to cohesive elements. In fact, the default surface is generated as if cohesive elements were not present. See Modeling with cohesive elements for further discussion of contact modeling issues related to cohesive elements.
Input File Usage
Use both of the following options to specify “automatic” contact for the entire model:
CONTACT CONTACT INCLUSIONS, ALL EXTERIOR
The CONTACT INCLUSIONS option should have no data lines when the ALL EXTERIOR parameter is used.
Abaqus/CAE Usage
Interaction module: Create Interaction: General contact (Standard): Included surface pairs: All* with self
Specifying individual contact interactions
Alternatively, you can define the general contact domain directly by specifying the individual contact surface pairings. Self-contact will be modeled only if the two surfaces specified in a pair overlap (or are identical) and will be modeled only in the overlapping region. In some cases computational performance and robustness can be improved by including only portions of surfaces in the general contact domain that will experience contact during an analysis.
Multiple surface pairings can be included in the contact domain. All of the surfaces specified must be element-based surfaces.
Input File Usage
Use both of the following options to specify individual contact interactions:
CONTACT CONTACT INCLUSIONS surface_1, surface_2
At least one data line must be specified when the ALL EXTERIOR parameter is omitted. Either or both of the data line entries can be left blank, but each data line must contain at least a comma; an error message will be issued for empty data lines. If the first surface name is omitted, the default unnamed, all-inclusive, automatically generated surface is assumed. If the second surface name is omitted or is the same as the first surface name, contact between the first surface and itself is assumed. Leaving both data line entries blank is equivalent to using the ALL EXTERIOR parameter.
Abaqus/CAE Usage
Interaction module: Create Interaction: General contact (Standard): Included surface pairs: Selected surface pairs: Edit, select the surfaces in the columns on the left, and click the arrows in the middle to transfer them to the list of included pairs
Examples
The following input specifies that contact should be enforced between the default all-inclusive, automatically generated surface and surface_2, including self-contact in any overlap regions:
CONTACT CONTACT INCLUSIONS , surface_2
Either of the following methods can be used to define self-contact for surface_1:
CONTACT CONTACT INCLUSIONS surface_1,
or
CONTACT CONTACT INCLUSIONS surface_1, surface_1
Specifying contact exclusions
You can refine the contact domain definition by specifying the regions of the model to exclude from contact. Possible motivations for specifying contact exclusions include:
-
avoiding physically unreasonable contact interactions;
-
improving computational performance by excluding parts of the model that are not likely to interact.
Contact will be ignored for all the surface pairings specified, even if these interactions are specified directly or indirectly in the contact inclusions definition.
Multiple surface pairings can be excluded from the contact domain. All of the surfaces specified must be element-based surfaces. Keep in mind that surfaces can be defined to span multiple unattached bodies, so self-contact exclusions are not limited to exclusions of single-body contact.
Input File Usage
Use both of the following options to specify contact exclusions:
CONTACT CONTACT EXCLUSIONS surface_1, surface_2
Either or both of the data line entries can be left blank. If the first surface name is omitted, the default unnamed, all-inclusive, automatically generated surface is assumed. If the second surface name is omitted or is the same as the first surface name, contact between the first surface and itself is excluded from the contact domain.
Abaqus/CAE Usage
Interaction module: Create Interaction: General contact (Standard): Excluded surface pairs: Edit, select the surfaces in the columns on the left, and click the arrows in the middle to transfer them to the list of excluded pairs
Automatically generated contact exclusions
Abaqus/Standard automatically generates contact exclusions for general contact in some situations.
-
Contact exclusions are generated automatically for interactions that are defined with the contact pair algorithm or surface-based tie constraints to avoid redundant (and possibly inconsistent) enforcement of these interaction constraints. For example, if a contact pair is defined for surface_1 and surface_2 and “automatic” general contact is defined for the entire model, Abaqus/Standard generates a contact exclusion for general contact between surface_1 and surface_2 so that interactions between these surfaces are modeled only with the contact pair algorithm. These automatically generated contact exclusions are in effect throughout the analysis.
-
Abaqus/Standard automatically generates contact exclusions for self-contact of each rigid body in the model, because it is not possible for a rigid body to contact itself.
-
When you specify pure master-slave contact surface weighting for a particular general contact surface pair, contact exclusions are generated automatically for the master-slave orientation opposite to that specified (see Numerical controls for general contact in Abaqus/Standard for more information on this type of contact exclusion).
-
Abaqus/Standard assigns default pure master-slave roles for contact involving disconnected bodies within the general contact domain, and contact exclusions are generated by default for the opposite master-slave orientations. Options to override the default pure master-slave assignments with alternative pure master-slave assignments or balanced master-slave assignments are discussed in Numerical controls for general contact in Abaqus/Standard.
-
Contact exclusions are generated automatically for portions of surfaces that are severely overclosed in the initial configuration of the model. See Controlling initial contact status in Abaqus/Standard for more information.
Examples
The following input specifies that the contact domain is based on self-contact of an all-inclusive, automatically generated surface but that contact (including self-contact in any overlap regions) should be ignored between the all-inclusive, automatically generated surface and surface_2:
CONTACT CONTACT INCLUSIONS, ALL EXTERIOR CONTACT EXCLUSIONS , surface_2
Either of the following methods can be used to exclude self-contact for surface_1 from the contact domain:
CONTACT EXCLUSIONS surface_1,
or
CONTACT EXCLUSIONS surface_1, surface_1
![]()
Edge-to-surface contact scenarios
The general contact algorithm can consider three-dimensional edge-to-surface contact. In addition to modeling contact between segments of beam or truss elements and faceted surfaces, it is more effective at resolving some interactions than the surface-to-surface contact formulation. Figure 2 and Figure 3 show examples in which the edge-to-surface contact formulation is most effective for resolving contact.
The contact edges representing beam and truss elements have a circular cross-section, regardless of the actual cross-section of the beam or truss element. The radius of a contact edge representing a truss element is derived from the cross-sectional area specified on the truss section definition (it is equal to the radius of a solid circular section with an equivalent cross-sectional area). For beams with circular cross-sections, the radius of the contact edge is equivalent to the section radius. For beams with non-circular cross-sections, the radius of the contact edge is equal to the radius of a circumscribed circle around the section. Edge-to-surface contact for beam or truss elements is activated by including the associated surfaces into the general contact domain. By default, the all-inclusive surface contains surfaces based on beam or truss elements.
The edge-to-surface contact formulation is commonly used to resist penetrations of feature edges of one surface into a relatively smooth portion of another surface, with the contact normal direction based on the relatively smooth surface. The master and slaves roles of surfaces in the edge-to-surface contact formulation are reversed for some situations involving large-diameter beams. By default, if half of the beam radius exceeds the facet dimensions of the other surface, the beam will act as the master surface such that the edge-to-surface contact formulation resists penetrations of a smooth portion of a neighboring solid or shell surface into a beam, with the contact normal direction based on the radial direction of the beam. The rightmost example in Figure 3 corresponds to such a case with a relatively large diameter beam (see Master and slave roles for details about how to control master and slave assignment).
The edge-to-surface contact formulation considers twisting of beams only for cases in which the contact normal is based on the radial direction of the beam. When considered, beam twisting influences the calculation of incremental slip.
By default, when a surface is used in a general contact interaction, all applicable facets are included in the contact definition along with edges of solid and shell elements with feature angles of at least 45°. See Feature edges for a discussion of controls related to which feature edges are considered for edge-to-surface contact. Edge-to-surface contact constraints never participate in thermal, electrical, or pore pressure contact properties. For example, in a coupled temperature-displacement analysis, surface-to-surface constraints can influence mechanical and thermal interactions; but, if edge-to-surface constraints are included, they will only help resist penetrations.
The contact area associated with a feature edge depends on the mesh size; therefore, contact pressures (in units of force per area) associated with edge-to-surface contact are mesh dependent.
![]()
Edge-to-edge contact scenarios
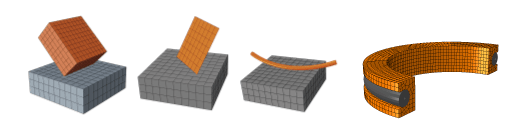
The general contact algorithm can optionally consider edge-to-edge contact except on crack surfaces for enriched elements. Feature edges on solid and shell-like surfaces, shell perimeter edges, and edges representing beams (and trusses) can be included. Figure 4 shows examples in which the edge-to-edge contact formulation is most effective for resolving contact.
Two edge-to-edge contact formulations are available. One formulation bases the contact normal direction on the cross product between the two respective edges considered for contact, and the other formulation uses a radial direction of one of the beams as the contact direction (similar to what is done for tube-to-tube contact elements, which are discussed in Tube-to-tube contact elements). Four of the examples in Figure 4 rely on the formulation with the cross product normal to resist penetrations, and the example on the bottom right of Figure 4 relies on the formulation with the radial normal. The edge-to-edge contact formulation with the radial normal is applicable only to cases with some thickness contributing to the contact calculations.
The example shown in Figure 5 involves compression of a spring modeled with beam elements. This example relies on the edge-to-edge contact formulation with a radial normal direction to resolve contact between adjacent spring coils, and it relies on the edge-to-surface contact formulation to resolve contact between the spring and other surfaces.
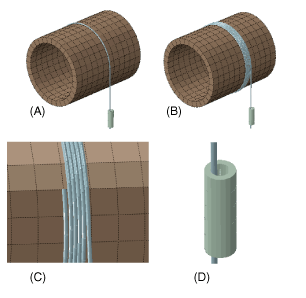
The edge-to-edge contact formulation with a radial normal can involve the “exterior” of beam, shell, and solid feature edges and the “interior” of hollow beams, as shown in the example in Figure 6. This example involves a wire modeled with beam elements being wound onto a cylinder modeled with solid elements. The wire passes through a hollow cylindrical guide before coming onto the cylinder. The “radial” edge-to-edge formulation resolves contact between adjacent coils of the wire and also resolves contact between the wire and the interior of the hollow beam representing the guide. The edge-to-surface contact formulation resolves contact between the wire and the cylinder.
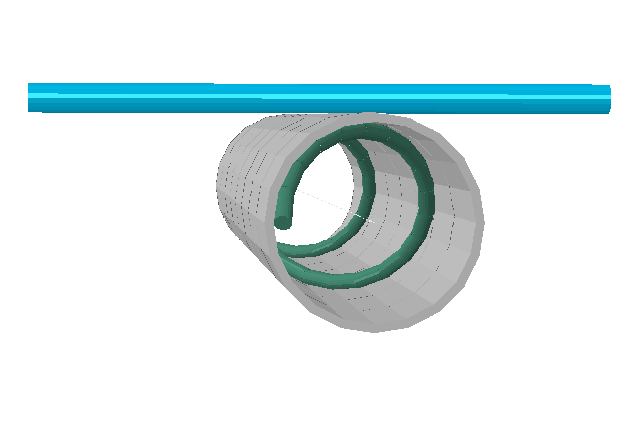
The edge-to-edge contact formulation with a contact normal direction based on the cross product of the edge directions is applicable only while edges are not nearly parallel. The edge-to-edge contact formulation with a radial contact normal direction is typically most applicable while contact edges are nearly parallel, but Figure 7 shows an exception. The hollow beam is simultaneously in contact with the two other beams. The cross product version of the edge-to-edge contact formulation resolves contact between the exterior of the hollow beam and the beam that is near the top of Figure 7. The radial version of the edge-to-edge contact formulation resolves contact between the interior of the hollow beam and the spiral-shaped beam, with the contact direction corresponding to the interior radial direction of the hollow beam. The radial version of the edge-to-edge contact formulation is effective in this case because individual segments of the spiral-shaped beam span relatively small arcs of the hollow tube.
In addition to choosing to activate one or both types of edge-to-edge contact formulations, you must specify a feature angle criterion to activate feature and perimeter edges to participate in edge-to-edge contact. See Feature edges for a discussion of controls related to which feature edges are considered for edge-to-edge contact. If only beam edges are present, specifying the contact formulation alone is sufficient.
Edge-to-edge contact formulations do not consider twisting of the beams. Beam-to-beam contact cannot be used to model contact between beam-like elements that share nodes with underlying solid or shell elements (for example, beam elements that are used to model stringers).
Input File Usage
Use the following option to activate both formulations for edge-to-edge contact:
CONTACT FORMULATION, TYPE=EDGE TO EDGE, FORMULATION=BOTH
Use the following option to deactivate edge-to-edge contact:
CONTACT FORMULATION, TYPE=EDGE TO EDGE, FORMULATION=NO (default)
Use the following option to activate the radial edge-to-edge contact formulation:
CONTACT FORMULATION, TYPE=EDGE TO EDGE, FORMULATION=RADIAL
Use the following option to activate the formulation based on the cross product of the edge directions for edge-to-edge contact:
CONTACT FORMULATION, TYPE=EDGE TO EDGE, FORMULATION=CROSS
Abaqus/CAE Usage
Modeling edge-to-edge contact is not supported in Abaqus/CAE.
![]()
Vertex-to-surface contact scenarios
The general contact algorithm can consider vertex-to-surface contact except on crack surfaces for enriched elements. Figure 8 shows examples in which the vertex-to-surface contact formulation is most effective for resolving contact. The vertex-to-surface contact formulation is intended to avoid localized penetration of a node at a convex corner of a solid or shell/membrane surface or at an end point or kink of a beam/truss into a relatively smooth portion of another surface. Most vertex nodes are along feature edges, although, for example, a node at the tip of a cone may satisfy the vertex node criteria. See Vertex nodes for a discussion of the vertex node criteria. Vertex nodes are effectively treated as spherical in the vertex-to-surface formulation. The spherical radius of the contact vertex corresponds to the surface thickness at the node.
![]()
Output
Output variables associated with contact fall into two categories: nodal variables (sometimes called constraint variables) and whole surface variables. In addition, Abaqus outputs an array of diagnostic information associated with contact interactions, as discussed in Contact diagnostics in an Abaqus/Standard analysis, and internal surfaces generated for general contact.
For more detailed discussions of variables associated with thermal, electrical, and pore fluid analyses, see the sections on the related contact properties in Contact Property Models.
General contact domain and component surfaces
Abaqus/Standard generates the following internal surfaces associated with general contact:
-
General_Contact_Faces,
-
General_Contact_Edges,
-
General_Contact_Vertices,
-
General_Contact_Faces_k,
-
General_Contact_Edges_k, and
-
General_Contact_Vertices_k,
where k corresponds to an automatically assigned “component number.” The three internal surfaces for general contact without a component number contain all surface faces, all feature edges, and all vertices, respectively, included in the general contact domain.
Each feature edge component surface, General_Contact_Edges_k, has a subset of face edges (satisfying the feature edge criteria) of the corresponding face component surface, General_Contact_Faces_k. Each vertex component surface, General_Contact_Vertices_k, has a subset of vertices (satisfying the vertex criteria) of the corresponding face component surface, General_Contact_Faces_k. The face component surfaces have no nodes in common with each other, except if beams and trusses are part of the contact domain that may share nodes with other faceted component surfaces. By default, a lowered-numbered component surface will act as a master surface to a higher-numbered component surface for the surface-to-surface and the radial version of the edge-to-edge formulations. Component numbers do not influence what is considered by the edge-to-surface, vertex-to-surface, and cross version of the edge-to-edge formulations. A component surface consisting of beam and truss elements will act as a master surface in the edge-to-surface formulation if half of the average element radius is larger than the average smallest facet length of the faceted component surface. Component surfaces are referred to in diagnostic messages for all formulation types.
Internal surfaces can be viewed using display groups in the Visualization module of Abaqus/CAE. Internal surface names generated by Abaqus/Standard should not be used in model definitions.
Nodal contact variables
Nodal contact variables can be contoured on contact surfaces in the Visualization module of Abaqus/CAE. Nodal contact variables include contact pressure and force, frictional shear stress and force, relative tangential motion (slip) of the surfaces during contact, clearance between surfaces, heat or fluid flux per unit area, and fluid pressure. Many of the nodal contact variables written to the output database (.odb) file are often available for all contact nodes, regardless of whether they act as slave or master nodes. Other nodal contact variables are available only at nodes acting as slave nodes. Most contact output to the data (.dat) file, results (.fil) file, and the utility subroutine GETVRMAVGATNODE is associated with individual constraints. For contact output to the output database (.odb) file, some filtering is applied to reduce contact output noise.
Contact pressure
The contact pressure distribution is of key interest in many Abaqus analyses. You can view the contact pressure on all contact surfaces except for analytical rigid surfaces and discrete rigid surfaces based on rigid-type elements (the latter restriction does not apply to general contact). You can view a contour plot of the contact pressure error indicator next to a contour plot of the contact pressure to gain perspective on local accuracy of the contact pressure solution in regions where the contact pressure solution is of interest (see Selection of error indicators influencing adaptive remeshing, for further discussion of error indicator output).
In some cases you may observe the contact pressure extending beyond the actual contact zone due to the following factors:
-
The contour plots are constructed by interpolating nodal values, which can cause nonzero values to appear within portions of facets outside of the contact region. For example, this effect is often noticeable at corners, such as when two same-sized, aligned blocks are in contact—if the contact surfaces wrap around the corners, the contact pressure contours will extend slightly around the corners.
-
To minimize contact stress noise within a region of active contact, Abaqus/Standard computes nodal contact stresses as weighted averages of values associated with active contact constraints in which a node participates. Some filtering is applied to reduce the contact stress values reported for nodes on the fringe of the active contact region (that only weakly participate in contact constraints), but this filtering is not “perfect,” which can result in the contact zone size appearing somewhat exaggerated. Similarly, contact status output will also be affected at nodes that lie on the fringe of the active contact region. In such cases the contact status may be reported as closed at nodes in the exaggerated region even though it is open.
Due to these factors, trying to infer the contact force distribution from the contact stress distribution can be somewhat misleading. Instead, you can request nodal contact force output, which accurately represents the contact force distribution present in the analysis.
Contact stresses due to edge-to-surface, edge-to-edge, and vertex-to-surface interactions
For edge-to-surface contact and for edge-to-edge contact with the radial formulation where the active contact is along a line, the output variable CLINELOAD can be requested to the output database (.odb) in Abaqus/Standard. This contact load has units of force per length and is mesh independent. Contact stresses (in units of force per area) solely due to edge-to-surface contact (CSTRESSETOS) can be output for visualizing regions where the edge-to-surface constraints are active. The edge-to-surface formulation computes contact stresses in units of force per area by dividing contact force per edge length by a representative surface facet length. Since the contact area depends on the mesh size, edge-to-surface contact stresses are mesh dependent. For edge-to-edge contact using the cross product formulation where the active contact region is idealized as a point, the mesh-independent output variable CPOINTLOAD (with units of force) can be requested.
For vertex-to-surface contact, the mesh-independent output variable CPOINTLOAD (with units of force) can be requested to the output database (.odb) in Abaqus/Standard.
Contact stresses (CSTRESS) contain contributions from surface-to-surface, edge-to-surface, edge-to-edge, and vertex-to-surface constraints, if active. While accumulating contributions from edge-to-surface, edge-to-edge, and vertex-to-surface contact constraints, the constraint values are divided by either a representative surface facet length or its squared value to appropriately scale them to have units of force per area.
Edges and vertices represent a discontinuity in the surface smoothness, and the true contact stress solution near an edge or a vertex is commonly characterized by a strong gradient. Subsequently, error indicator output for contact stresses (CSTRESSERI) are typically quite high and acceptable for regions in which constraints involving edges and vertices are significant.
Whole surface variables
Whole surface variables are only marginally supported for general contact in Abaqus/Standard because these variable are associated with the overall general contact domain by default rather than individual surfaces associated with general contact. The only way to limit whole surface variables to be affected by a portion of the general contact domain is to specify a node set in the output request. Whole surface variables are computed as sums over all nodes (or optionally limited to a particular node set) of general contact while acting as slave nodes. For example, CFN is the total force acting on slave nodes due to contact pressure. CFN and other whole surface variables for general contact are typically of little utility, because contributions to the variable from different interactions within general contact will often cancel one another and the net result will typically depend on internal assignments of master and slave roles.
Requesting output
Certain contact variables must be requested as a group. For example, to output the clearance between surfaces (COPEN), you must request the variable CDISP (contact displacements). CDISP outputs both COPEN and CSLIP (tangential motion of the surfaces during contact). A complete listing of available contact variables and identifiers is given in Abaqus/Standard output variable identifiers.
Output requests can be limited by specifying a node set containing a subset of the nodes acting as slave nodes for some general contact interactions. Instructions on forming these output requests are available in the following sections:
-
To request output to the data (.dat) file, see Surface output from Abaqus/Standard.
-
To request output to the output database (.odb) file, see Surface output in Abaqus/Standard and Abaqus/Explicit.
Output of tangential results
Abaqus reports the values of tangential variables (frictional shear stress, viscous shear stress, and relative tangential motion) with respect to the local tangent directions defined on the surfaces. The local tangent directions CTANDIR1 and CTANDIR2 can be output by requesting the generic output variable CTANDIR. The definition of local tangent directions is explained in Local tangent directions on a surface. These directions do not always correspond to the global coordinate system, and they rotate with the contact pair in a geometrically nonlinear analysis.
Abaqus/Standard calculates tangential results at each constraint point by taking the scalar product of the variable's vector and a local tangent direction, or , associated with the constraint point. The number at the end of a variable's name indicates whether the variable corresponds to the first or second local tangent direction. For example, CSHEAR1 is the frictional shear stress component in the first local tangent direction, while CSHEAR2 is the frictional shear stress component in the second local tangent direction.
Definition of accumulated incremental relative motion (slip)
Abaqus/Standard defines the incremental relative motion (also known as slip) as the scalar product of the incremental relative nodal displacement vector and a local tangent direction. The incremental relative nodal displacement vector measures the motion of a slave node relative to the motion of the master surface. The incremental slip is accumulated only when the slave node is contacting the master surface. The sums of all such incremental slips during the analysis are reported as CSLIP1 and CSLIP2. Details about the calculation of this quantity can be found in Small-sliding interaction between bodies, Finite-sliding interaction between deformable bodies, and Finite-sliding interaction between a deformable and a rigid body.
Extending the range for which contact opening output is provided for gaps
To reduce computational costs, detailed computations to monitor potential points of interaction are avoided by default where surfaces are separated by a distance greater than the minimum gap distance at which contact forces (or thermal fluxes, etc.) may be transmitted. Therefore, contact opening (COPEN) output is typically not provided where surfaces are opened by more than a small amount compared to surface facet dimensions. You can extend the range for which Abaqus/Standard provides contact opening output; COPEN will be provided up to gap distances equal to a specified “tracking thickness.” Using this control may increase computational cost due to extra contact tracking computations, especially if you specify a large tracking thickness value.
Input File Usage
SURFACE INTERACTION, TRACKING THICKNESS=value
Abaqus/CAE Usage
You cannot adjust the default tracking thickness in Abaqus/CAE.
Whole model contact-related energy variables
The contact-related energy variables, shown in Table 1, are available in Abaqus/Standard (see Abaqus/Standard output variable identifiers). An example of using the contact-related energies is provided in Energy computations in a contact analysis.
| Description | Output variable | |
|---|---|---|
| Frictional dissipation | ALLFD | |
| Elastic contact energy | Energy stored among all penalty springs and “softened” contact constraints associated with normal contact constraints | ALLCCEN |
| Energy stored among all penalty springs associated with tangential contact constraints | ALLCCET | |
| Energy stored among all penalty springs and “softened” contact constraints associated with normal and tangential contact constraints (equal to the sum of ALLCCEN and ALLCCET) | ALLCCE | |
| Energy dissipation associated with contact stabilization and contact damping | Normal contact direction for the whole model | ALLCCSDN |
| Tangential contact direction for the whole model | ALLCCSDT | |
| Whole model (equal to the sum of ALLCCSDN and ALLCCSDT) | ALLCCSD | |
| Energy associated with contact constraint “discontinuity work” | Accounts for the portion of the work done by contact forces when contact conditions change that is not accounted for by other contact energy variables | ALLCCDW |
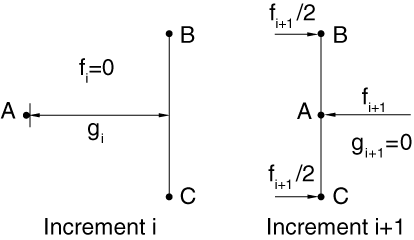
The output variables ALLSD and ALLVD also account for dissipative energies associated with contact stabilization and contact damping.
The elastic contact energies and dissipative energies associated with contact stabilization and contact damping are associated with numerical effects that would be zero in idealized situations, such as infinite penalty stiffness or zero stabilization stiffness. Significant values of these output variables compared to other physically based energies in a model, such as internal energy (ALLIE), are sometimes indicative of solution inaccuracy. The contact constraint discontinuity work will tend to zero as the time increment size becomes very small. However, as discussed in Energy computations in a contact analysis, it is quite common for ALLCCDW to have a significant value without causing solution inaccuracy.
The modified external work (ALLWK + ALLCCDW) is often representative of the physical external work in contact problems in terms of being equal to the sum of the stored and dissipated energies (see Energy computations in a contact analysis). Consider a particular contact constraint having a gap distance, , in one increment and becoming closed with contact force, , in the next increment (see Figure 9). A trapezoidal rule for integrating the work done by the contact force multiplies the average force by the relative incremental motion. In this case the resulting contribution to ALLCCDW is negative . This energy contribution is nonphysical and would disappear in the numerics as the time increment tends to zero. When contact opens up, similar behavior happens with sign reversals. Numerical integration for ALLWK is also limited with respect to accounting accurately for sudden changes in external forces. Summing ALLWK and ALLCCDW often cancels the respective nonphysical energy contributions, and the net effect on the total energy balance ETOTAL is zero.