Creating alternative material directions | ||
| ||
Context:
Figure 1 shows local rectangular, cylindrical, and spherical coordinate systems definitions.
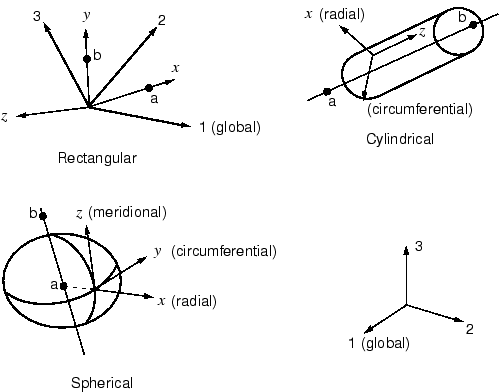
You define the orientation of the local (, , ) coordinate system, as well as which of the local axes corresponds to which material direction. Thus, you must specify the local axis (1, 2, or 3) that is closest to being normal to the shell's surface. Abaqus follows a cyclic permutation (1, 2, 3) of the axes and projects the axis following your selection onto the shell region to form the material 1-direction. For example, if you choose the -axis, Abaqus projects the -axis onto the shell to form the material 1-direction. The material 2-direction is defined by the cross product of the shell normal and the material 1-direction. Normally, the final material 2-direction and the projection of the other local axis, in this case the -axis, will not coincide for curved shells.
If these local axes do not create the desired material directions, you can specify a rotation about the selected axis. The other two local axes are rotated by this amount before they are projected onto the shell's surface to give the final material directions. For the projections to be interpreted easily, the selected axis should be as close as possible to the shell normal.
For example, if the centerline of the cylinder shown in Figure 2 coincides with the global 3-axis, local material directions can be defined such that the local material 1-direction is always circumferential and the corresponding local material 2-direction is always axial. The procedure is described below.