Shell elements | ||
| ||
Shell element names in Abaqus begin with the letter “S.” Axisymmetric shells all begin with the letters “SAX.” Abaqus/Standard also provides axisymmetric shells with asymmetric deformations, which begin with the letters “SAXA.” The first number in a shell element name indicates the number of nodes in the element, except for the case of axisymmetric shells, for which the first number indicates the order of interpolation.
Two types of shell elements are available in Abaqus: conventional shell elements and continuum shell elements. Conventional shell elements discretize a reference surface by defining the element's planar dimensions, its surface normal, and its initial curvature. Continuum shell elements, on the other hand, resemble three-dimensional solid elements in that they discretize an entire three-dimensional body yet are formulated so that their kinematic and constitutive behavior is similar to conventional shell elements. In this guide only conventional shell elements are discussed. Henceforth, we will refer to them simply as “shell elements.” For more information on continuum shell elements, see About shell elements.
The use of shell elements is discussed in detail in Using Shell Elements.
- Shell element library
In Abaqus/Standard general three-dimensional shell elements are available with three different formulations: general-purpose, thin-only, and thick-only. The general-purpose shells and the axisymmetric shells with asymmetric deformation account for finite membrane strains and arbitrarily large rotations. The three-dimensional “thick” and “thin” element types provide for arbitrarily large rotations but only small strains. The general-purpose shells allow the shell thickness to change with the element deformation. All of the other shell elements assume small strains and no change in shell thickness, even though the element's nodes may undergo finite rotations. Triangular and quadrilateral elements with linear and quadratic interpolation are available. Both linear and quadratic axisymmetric shell elements are available. All of the quadrilateral shell elements (except for S4) and the triangular shell element S3/S3R use reduced integration. The S4 element and the other triangular shell elements use full integration. Table 1 summarizes the shell elements available in Abaqus/Standard.
Table 1. Three classes of shell elements in Abaqus/Standard. General-Purpose Shells Thin-Only Shells Thick-Only Shells S4, S4R, S3/S3R, SAX1, SAX2, SAX2T, SC6R, SC8R STRI3, STRI65, S4R5, S8R5, S9R5, SAXA S8R, S8RT All the shell elements in Abaqus/Explicit are general-purpose. Finite membrane strain and small membrane strain formulations are available. Triangular and quadrilateral elements are available with linear interpolation. A linear axisymmetric shell element is also available. Table 2 summarizes the shell elements available in Abaqus/Explicit.
Table 2. Two classes of shell elements in Abaqus/Explicit. Finite-Strain Shells Small-Strain Shells S4, S4R, S3/S3R, SAX1 S4RS, S4RSW, S3RS For most explicit analyses the large-strain shell elements are appropriate. If, however, the analysis involves small membrane strains and arbitrarily large rotations, the small-strain shell elements are more computationally efficient. The S4RS and S3RS elements do not consider warping, while the S4RSW element does.
The shell formulations available in Abaqus are discussed in detail in Using Shell Elements.
- Degrees of freedom
The three-dimensional elements in Abaqus/Standard whose names end in the number “5” (e.g., S4R5, STRI65) have 5 degrees of freedom at each node: three translations and two in-plane rotations (i.e., no rotations about the shell normal). However, all six degrees of freedom are activated at a node if required; for example, if rotational boundary conditions are applied or if the node is on a fold line of the shell.
The remaining three-dimensional shell elements have six degrees of freedom at each node (three translations and three rotations).
The axisymmetric shells have three degrees of freedom associated with each node:
1 Translation in the r-direction. 2 Translation in the z-direction. 6 Rotation in the r–z plane. - Element properties
All shell elements must refer to a shell section property that defines the thickness and material properties associated with the element.
The stiffness of the shell cross-section can be calculated either during the analysis or once at the beginning of the analysis.
If you choose to have the stiffness calculated during the analysis, Abaqus uses numerical integration to calculate the behavior at selected points through the thickness of the shell. These points are called section points, as shown in Figure 1. The associated material property definition may be linear or nonlinear. You can specify any odd number of section points through the shell thickness.
Figure 1. Section points through the thickness of a shell element.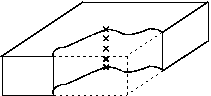
If you choose to have the stiffness calculated once at the beginning of the analysis, you can define the cross-section behavior to model linear or nonlinear behavior. In this case Abaqus models the shell's cross-section behavior directly in terms of section engineering quantities (area, moments of inertia, etc.), so there is no need for Abaqus to integrate any quantities over the element cross-section. Therefore, this option is less expensive computationally. The response is calculated in terms of force and moment resultants; the stresses and strains are calculated only when they are requested for output. This approach is recommended when the response of the shell is linear elastic.
- Element output variables
The element output variables for shells are defined in terms of local material directions that lie on the surface of each shell element. In all large-displacement simulations these axes rotate with the element's deformation. You can also define a local material coordinate system that rotates with the element's deformation in a large-displacement analysis.